|
Xiaohan Zhang I am currently a robotics researcher at Boston Dynamics AI Institute. I completed my PhD in Computer Science at the State University of New York at Binghamton, advised by Shiqi Zhang. In the summer and fall of 2023, I was a Research Scientist Intern in the Embodied AI team at Meta AI (FAIR) working with Chris Paxton. In the spring of 2023, I spent time visiting the Learning Agents Research Group (LARG) at the University of Texas at Austin, supervised by Peter Stone. In the summer of 2022, I was a Student Researcher with the Robotics team at Google DeepMind. I obtained my bachelor's degree from Renmin University of China in 2019.
CV /
Google
Scholar
/
Twitter /
LinkedIn |

|
Selected ResearchMy research is at the intersection of robotics and AI. My PhD thesis focuses on Symbol Grounding and Task and Motion Planning (TAMP). More recently, I'm interested in robotics foundation models. |

|
ZeroBot: Learning from Scratch in Minutes with
Generative Real2Sim
Ivan Kapelyukh, Xiaohan Zhang, Stephen James, Laura Herlant, Edward Johns IEEE Robotics and Automation Letters (RA-L), 2026 IEEE |
|
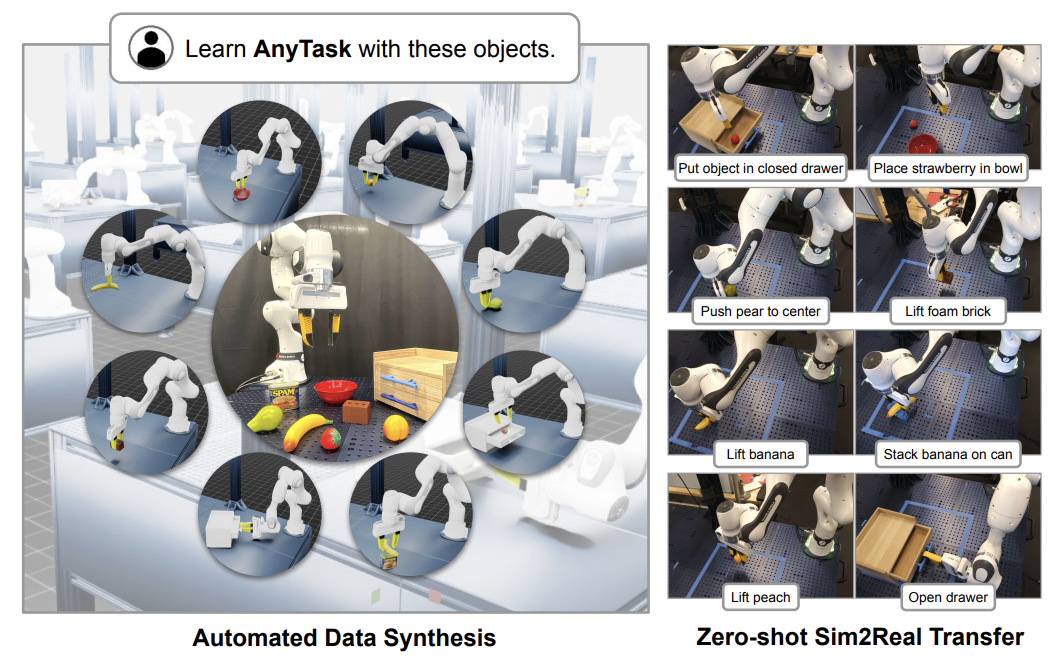
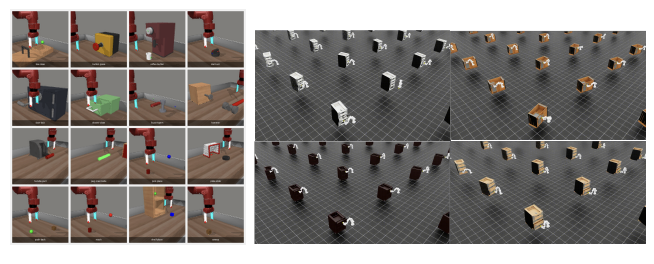
AnyTask: an Automated Task and Data Generation
Framework for Advancing Sim-to-Real Policy Learning
Ran Gong*, Xiaohan Zhang*, Jinghuan Shang*, Maria Vittoria Minniti*, Jigarkumar Patel, Valerio Pepe, Riedana Yan, Ahmet Gundogdu, Ivan Kapelyukh, Ali Abbas, Xiaoqiang Yan, Harsh Patel, Laura Herlant, Karl Schmeckpeper Preprint, 2025 project page / arXiv |
|
Data-Efficient Multitask DAgger
Haotian Fu, Ran Gong, Xiaohan Zhang, Maria Vittoria Minniti, Jigarkumar Patel, Karl Schmeckpeper Preprint, 2025 arXiv |
|
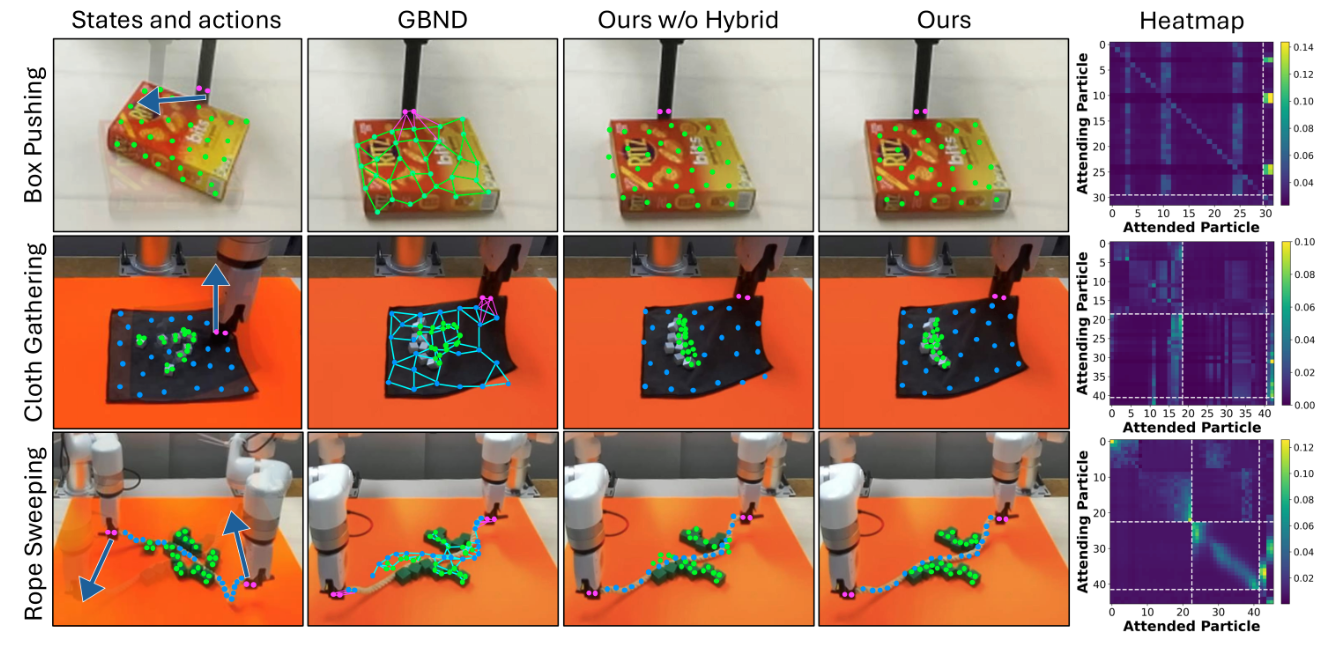
ParticleFormer: A 3D Point Cloud World Model for
Multi-Object, Multi-Material Robotic Manipulation
Suning Huang, Qianzhong Chen, Xiaohan Zhang, Jiankai Sun, Mac Schwager Conference on Robot Learning (CoRL), 2025 project page / arXiv |
|
Prompting VLMs with and for Classical Planners
Xiaohan Zhang, Zainab Altaweel*, Yohei Hayamizu*, Yan Ding, Saeid Amiri, Hao Yang, Andy Kaminski, Chad Esselink, Shiqi Zhang Preprint, 2024 project page / arXiv |
|
OpenEQA: Embodied Question Answering in the Era of
Foundation Models
Arjun Majumdar*, Anurag Ajay*, Xiaohan Zhang*, et al. IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2024 project page / blog post / paper |
|
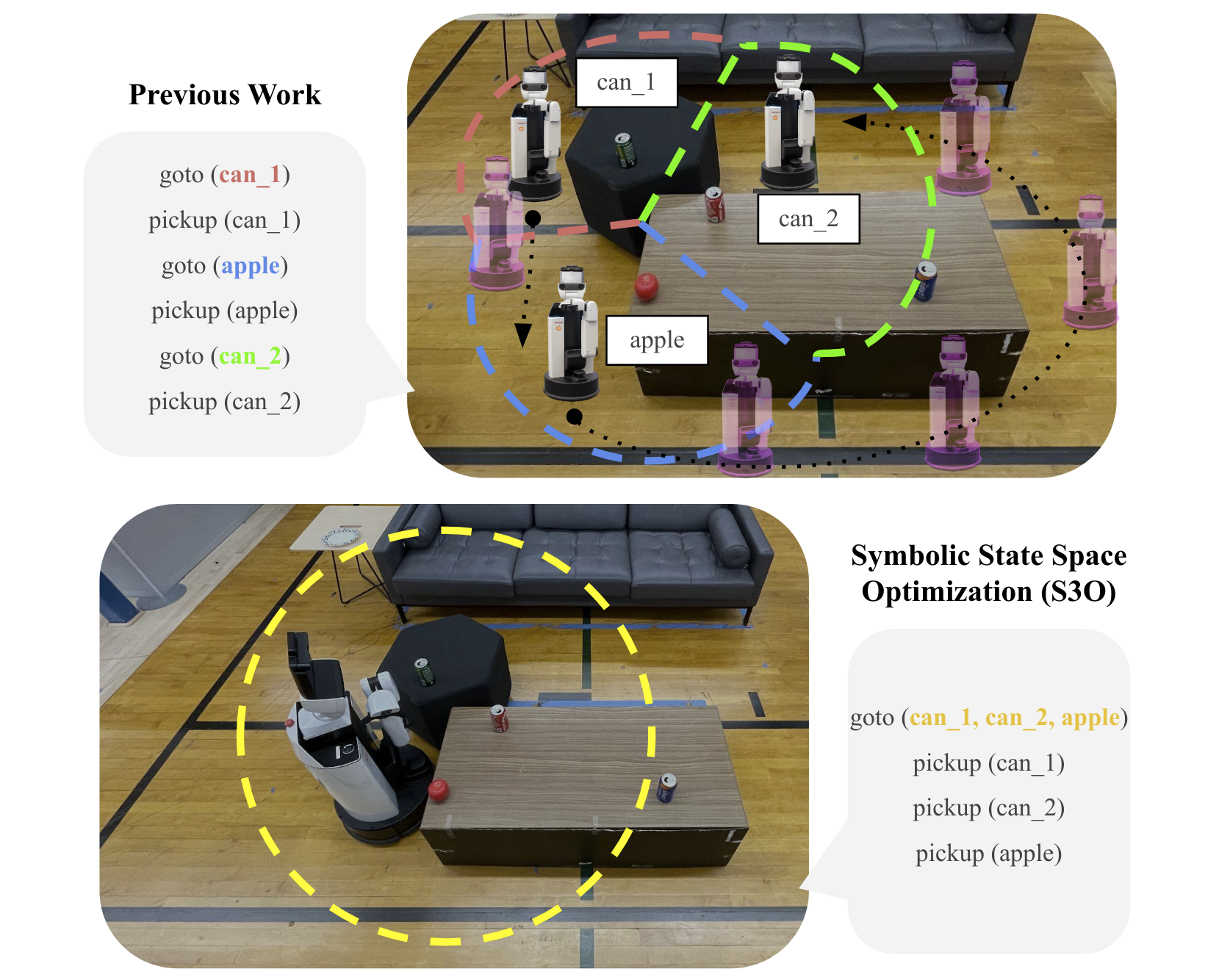
Symbolic State Space Optimization for Long Horizon
Mobile Manipulation Planning
Xiaohan Zhang, Yifeng Zhu, Yan Ding, Yuqian Jiang, Yuke Zhu, Peter Stone, Shiqi Zhang IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2023 project page / arXiv |
|
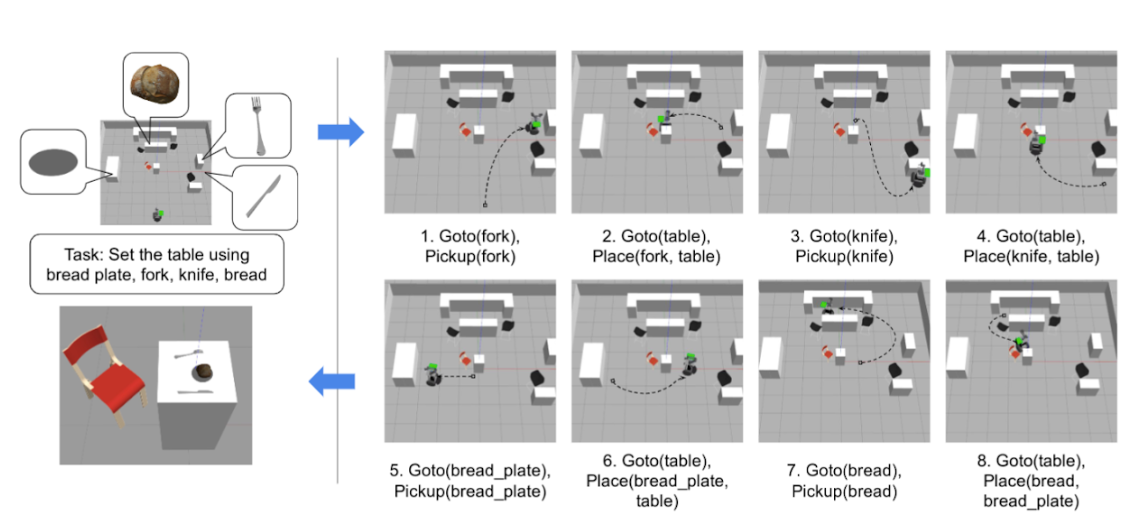
Task and Motion Planning with Large Language Models for
Object Rearrangement
Yan Ding*, Xiaohan Zhang*, Chris Paxton, Shiqi Zhang The International Journal of Robotics Research (IJRR), 2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2023 project page / arXiv / code |
|
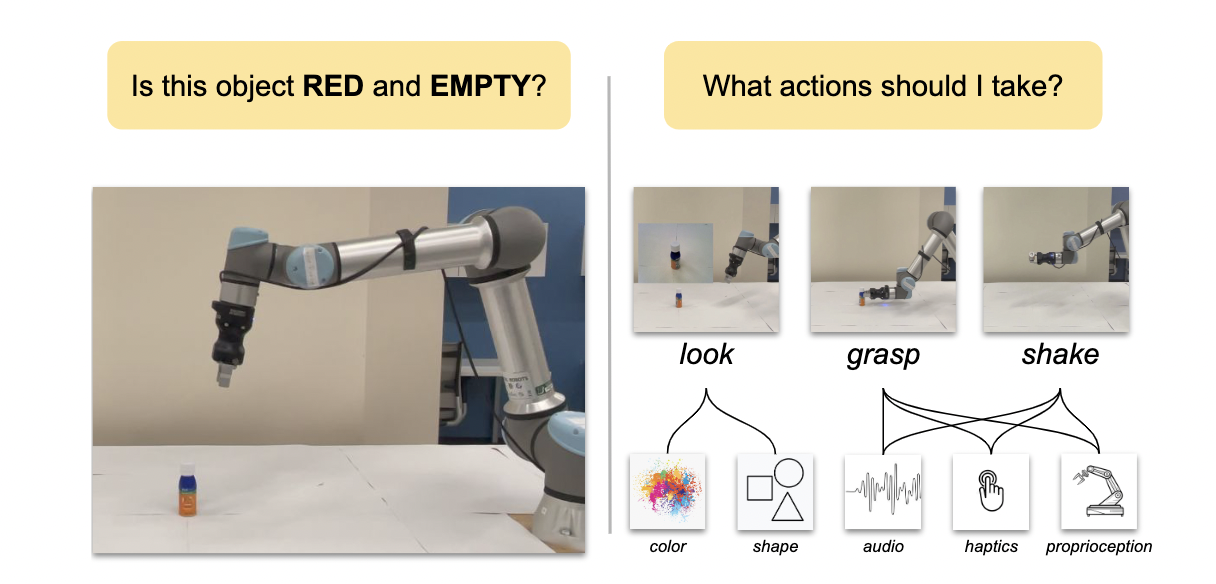
Multimodal Embodied Attribute Learning by Robots for
Object-Centric Action Policies
Xiaohan Zhang, Saeid Amiri, Jivko Sinapov, Jesse Thomason, Peter Stone, Shiqi Zhang Autonomous Robots, 2023 Robotics: Science and Systems (RSS), 2021 project page / paper / Springer Nature official / RSS version |
|
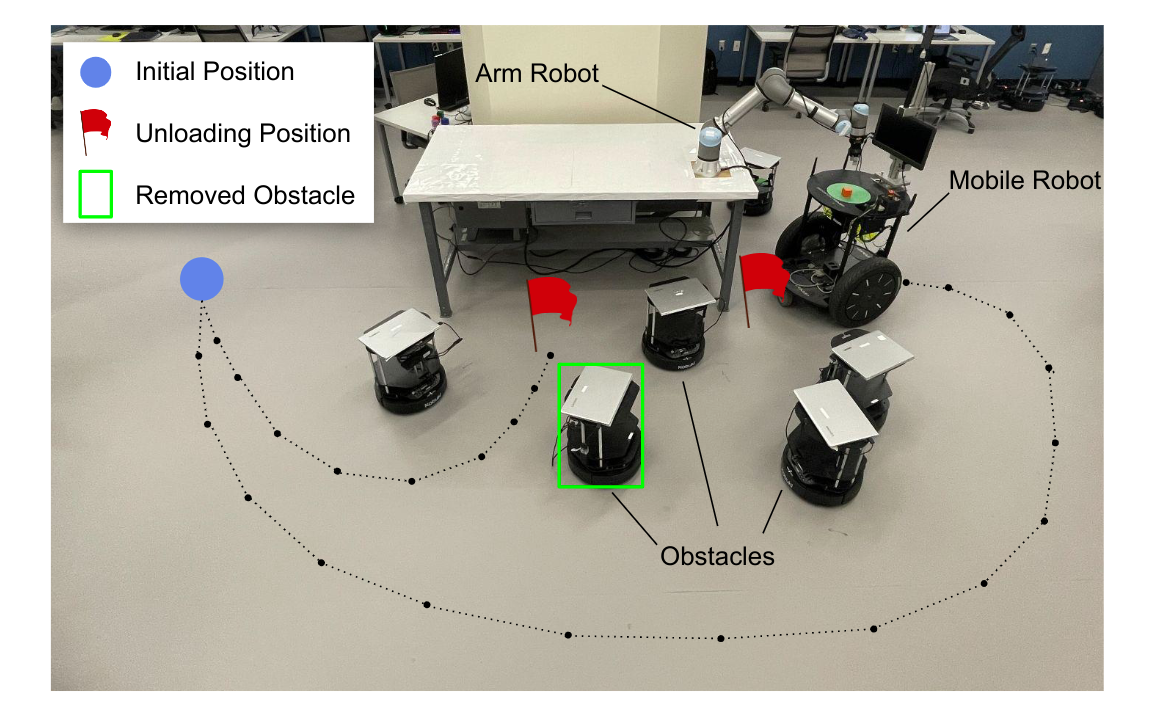
Visually Grounded Task and Motion Planning for Mobile
Manipulation
Xiaohan Zhang, Yifeng Zhu, Yan Ding, Yuke Zhu, Peter Stone, Shiqi Zhang IEEE International Conference on Robotics and Automation (ICRA), 2022 project page / arXiv |
|
Website template stolen from here. |